ドローンは、エンターテインメント(テレビ番組や映画制作)、趣味の写真撮影、さらには単なる娯楽用の玩具として広く普及しています。アクセス困難な場所に到達できる能力を持つため、検査、物流・配送、セキュリティや監視、その他の産業用途でも利用が増えています。ところで、ドローンの運用を可能にする最も重要な構成要素がビジョンシステムであることをご存じでしょうか。本題に入る前に、まずドローンとは何か、その多様な用途、そして人気が急上昇した理由を探ってみます。最後に、オンセミがこれらの驚異的な飛行体を支えるビジョンシステムをどのように変革しているかを説明します。
ドローンのタイプと用途
ドローンは無人航空機(UAV:unmanned aerial vehicles)であり、無人航空機システム(UAS:unmanned aerial systems)、またはあまり一般的ではありませんが遠隔操縦航空機(RPA:remotely piloted aircrafts)とも呼ばれます。これらは人の操作を必要とせず、さまざまなシステムを用いて自律航行することができます。
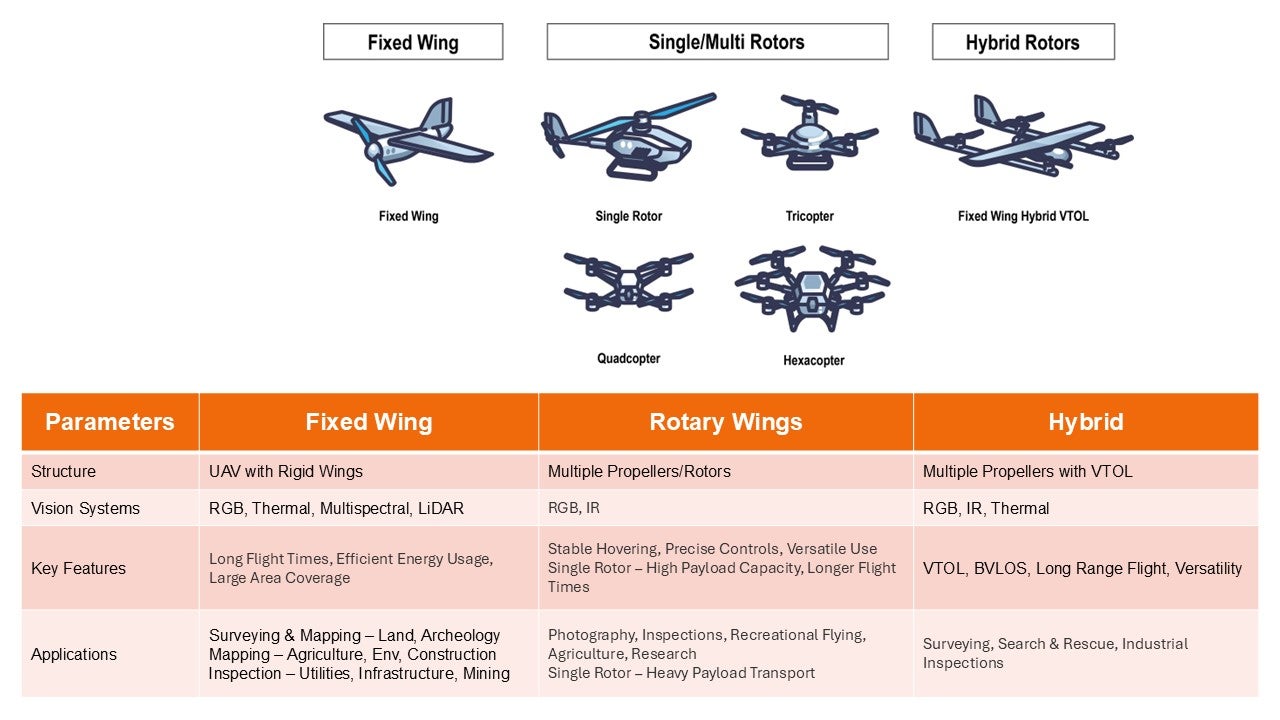
ドローンには固定翼、シングルローター/マルチローター、ハイブリッドの3つのタイプがあります。それぞれ異なる目的に対応して設計されています。
固定翼は一般的に重量物の輸送や長時間飛行に用いられ、情報・監視・偵察(ISR:intelligence, surveillance and reconnaissance)任務、戦闘活動、徘徊型兵器、マッピング、研究活動などに展開されています。
シングル/マルチローターは最も広く利用されており、倉庫業務から検査、さらには配送用途まで、産業界で幅広く活用されています。これらは多様なユースケースに展開できるため、目的も多岐にわたり、高度に最適化された電気機械的ソリューションが求められます。
ハイブリッドローターは上記2つのタイプの長所を取り入れ、垂直離着陸(VTOL:vertical take-off and landing)機能を備えているため、特にスペースが限られた地域で柔軟に運用できます。ほとんどの配送ドローンがこの機能を活用しているのには明確な理由があります。
ドローンのモーションシステムとナビゲーションシステム
ドローンは、加速度センサー、ジャイロスコープ、磁気センサー(総称して慣性計測ユニット、IMU)、気圧センサーなど、動作制御と航行制御のための多数のセンサーを搭載しています。これらはオプティカルフロー(深度センサーによる補助)、自己位置推定と環境地図作成の同時実行(SLAM:simultaneous localization and mapping)、視覚オドメトリーなどのアルゴリズムや技術を使用します。 これらのセンサーは十分に機能しますが、手頃なコストや最適なサイズで要求される確度や精度を実現するのは困難です。さらに飛行時間が長くなると問題は深刻化し、高価なバッテリーが必要になったり、充電サイクルに基づいて飛行時間が制限されたりします。
ドローンのビジョンシステム
イメージセンサーは上記のセンサーを補完し、運用能力を大幅に強化することで高確度・高精度な機体を実現します。これらはジンバル(ペイロードと呼ばれることがある)とビジョンナビゲーションシステム(VNS:Vision Navigation Systems)の2つの形態で利用可能です。
ジンバル* – 一人称視点(FPV:provide first person view)を提供します。一般的に、広範な電磁スペクトルをカバーするさまざまなタイプのイメージセンサー(例外的な紫外線領域、300nm~1000nmに対応する通常のCMOSイメージセンサー、2000nmまでの短波長赤外線(SWIR)センサー、さらに2000nmを超える中波長(MWIR)および長波長赤外線(LWIR)センサーなど)で構成されます。
ビジョンナビゲーションシステム(VNS) – ナビゲーションガイダンス、物体回避、衝突回避を提供します。一般に安価な低解像度イメージセンサーで構成され、IMUやセンサーデータと組み合わせてコンピュータビジョン技術を活用し、自律航法のための包括的なソリューションを構築します。
ビジョンシステムの重要性
ドローンは前述の運用方法や用途に見られるように、屋内外の両方で運用されます。これらの環境条件は、照明の大きな変動や、埃・霧・煙・完全な暗闇による視界制限など、環境は非常に過酷です。これらのシステムは、前述の技術から得られるデータを補助的に利用しつつ、画像データに対して人工知能(AI)や機械学習(ML)のアルゴリズムを適用し、低消費電力で長距離飛行や長時間運用を可能にする高度に最適化された機体の運用を目指します。
これらのアルゴリズムに入力されるデータは高忠実度かつ高精細であることが不可欠ですが、特定のユースケースでは必要な情報だけを提供して、効率的な処理を可能にすることも求められます。AI/MLのトレーニング時間は短く、推論処理は高速かつ高確度・高精度である必要があります。これらの要件を満たすために、ドローンがどのような環境で動作していても、画像は高品質でなければなりません。
単にシーンを撮影して処理に送るだけのセンサーでは高品質な動作を実現できず、多くの場合、ドローンの導入目的自体が失われてしまいます。関心領域(ROI)の詳細を保持しながらデータを縮小する機能、同一フレーム内で明暗両方の照明条件に対応する広いダイナミックレンジ、画像内の寄生効果の最小化・除去、埃・霧・煙に満ちた視野への対応、高い深度分解能による画像支援といった能力は、UAVを高度に最適化された機体にする上で大きなメリットをもたらします。
これらの機能は、画像の再構築や分析、意思決定プロセスの迅速化に必要なリソース(プロセッサコア、GPU、オンチップ/オフチップメモリ、バスアーキテクチャー、パワーマネジメント)の規模を最小限に抑えます。さらに、今日のUAVが10個以上のイメージセンサーを容易に搭載できることを考慮すると、システム全体のBOMコストの削減にも大きく寄与します。一方で、同じリソースセットを用いても、より高度な分析や複雑なアルゴリズムを実行し、効果的な意思決定を支援することが可能となり、この競争の激しい分野でUAVを差別化することができます。
オンセミはセンシング分野の技術リーダーであり、ビジョンシステムソリューションに革新的な技術を提供し、ジンバルやVNSのニーズに対応する包括的なイメージセンサーを提供しています。Hyperlux LP、Hyperlux LH、Hyperlux SG、Hyperlux ID、Hyperlux SW製品ファミリーは、ドローンビジョンシステムのニーズに徹底的に対応する数多くの技術と機能を搭載しています。ドローンメーカーは、NDAA(米国国防権限法)に準拠した単一の米国供給元からビジョンセンサーを調達できるようになりました。
オンセミのイメージセンサーと深度センサーの詳細については、以下の資料をご覧ください。
* ジンバルとは、厳密には特定のペイロードを保持して安定させるメカニズムを指しますが、それらを含むアセンブリ全体をジンバルと呼ぶ場合もよくあります。