Electric motors play a crucial role in today’s industry and everyday life. Various applications—from household appliances to automotive and heavy industrial robots—employ brushless DC (BLDC) and AC motors due to their high efficiency and broader customizability. AC and BLDC motors are preferred in many applications as they have few disadvantages, such as microcontroller cost and complex control algorithms. This blog series will talk about some of the different motor control schemes starting with field-oriented control (FOC) of a BLDC or AC motor.
FOC is one of the most efficient ways to drive an electric motor. The primary goal of FOC is to maintain orthogonal stator and rotor magnetic fields to create maximum torque. One method constantly monitors the three time-varying phase currents and modulates each applied phase voltage to achieve the correct time-varying stator field orientation. This is, however, easier said than done and is difficult in practice due to increased hardware/software requirements.
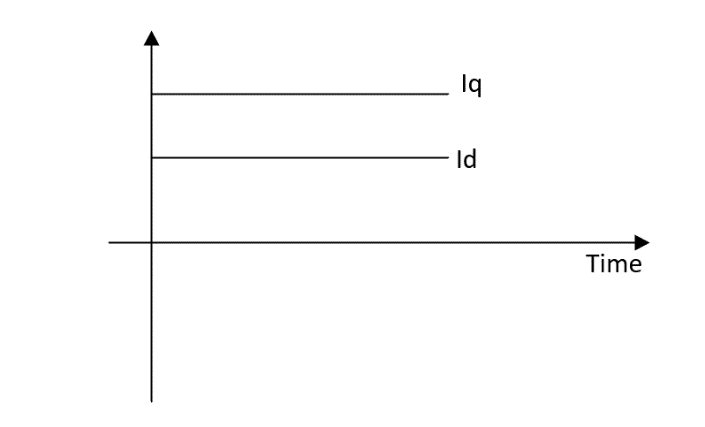
In field-oriented control, the time-varying currents are still monitored and projected onto a stationary reference frame, where they are decomposed into their torque (q-axis) and field flux (d-axis) components. This is done mathematically through Clarke transformation and Park transformation, and this helps directly control the torque in a time-invariant reference frame, reducing the control complexity and bandwidth requirements.
Figure 1: Projecting 3-Phase Currents in Clarke Transformation (Iα and Iβ) and Then to a Linear d,q Rotating Reference Frame Through Park Transformation
The commanded d-q axis components are then translated back to the 3-phase time-varying system to correctly modulate the 3-phase currents via PWM control of the inverter switches.
However, the rotor’s magnetic field angle must be known to maintain orthogonal stator and rotor magnetic fields. This can be achieved by either position feedback via encoders or resolvers (sensored) or by software through back-EMF/flux observers used to estimate rotor angle from measured phase currents (sensorless). Encoders are generally classified into two categories, incremental and absolute. Incremental encoders can measure relative angular position and rotation direction but cannot provide absolute position information at zero speed. For example, with an incremental quadrature encoder, two A/B pulse signals in the quadrature-phase denote the relative angular movement (e.g., 1000 pulses per revolution), with an additional Z index signal sometimes provided to provide a reference point. The polarity of the relative phase of the A/B signals (e.g., A lags B or B lags A) denotes the direction of rotation. Absolute encoders provide a true angular position with various digital encoding implementations. Still, they often require a communication bus to send the signals to a controller due to the increased signal count and bandwidth requirement (e.g., 16-bit position encoding).
Phase Current Sensing
Regardless of the sensored or sensor-less implementation chosen for FOC, phase currents must be accurately measured to maintain accurate torque control. The most common method of measuring phase currents is low-side sensing in the inverter stage with a shunt resistor between the source of each low-side MOSFET and ground. Low-cost current sense amplifiers can be used due to the reduced common-mode voltage of the shunts. High-side (inline) phase current sensing generally requires expensive specialty high-CMRR or isolated amplifier circuits to mitigate common-mode voltage errors because the common-mode voltage fluctuates between roughly the DC input voltage and ground at the PWM frequency.
Ideally, all three phase-currents are measured simultaneously, but it is possible to reduce the shunt resistor count, and thus system cost and power loss, at the expense of increased current-sensing bandwidth and software complexity. A two-shunt configuration relies on Kirchhoff’s current law to calculate the unmeasured current from the two measured currents (e.g., current into U and V phases equals current out of W phase). A single-shunt configuration requires knowledge of the inverter switching states to correlate the measured current to the actual phase currents. Generally, the measurement accuracy for determining all phase currents decreases with every decrease in shunt resistor count (from three to one). Thus, faster measurement circuits are required, and total system delay becomes a more significant factor. In addition, software complexity increases in tracking the right moment for sensing and determining the correlation from measured currents to actual phase currents, most notably in a single-shunt configuration.
Figures 2 and 3 illustrate examples of sensored and sensorless FOC motor control systems below.
Sensored FOC
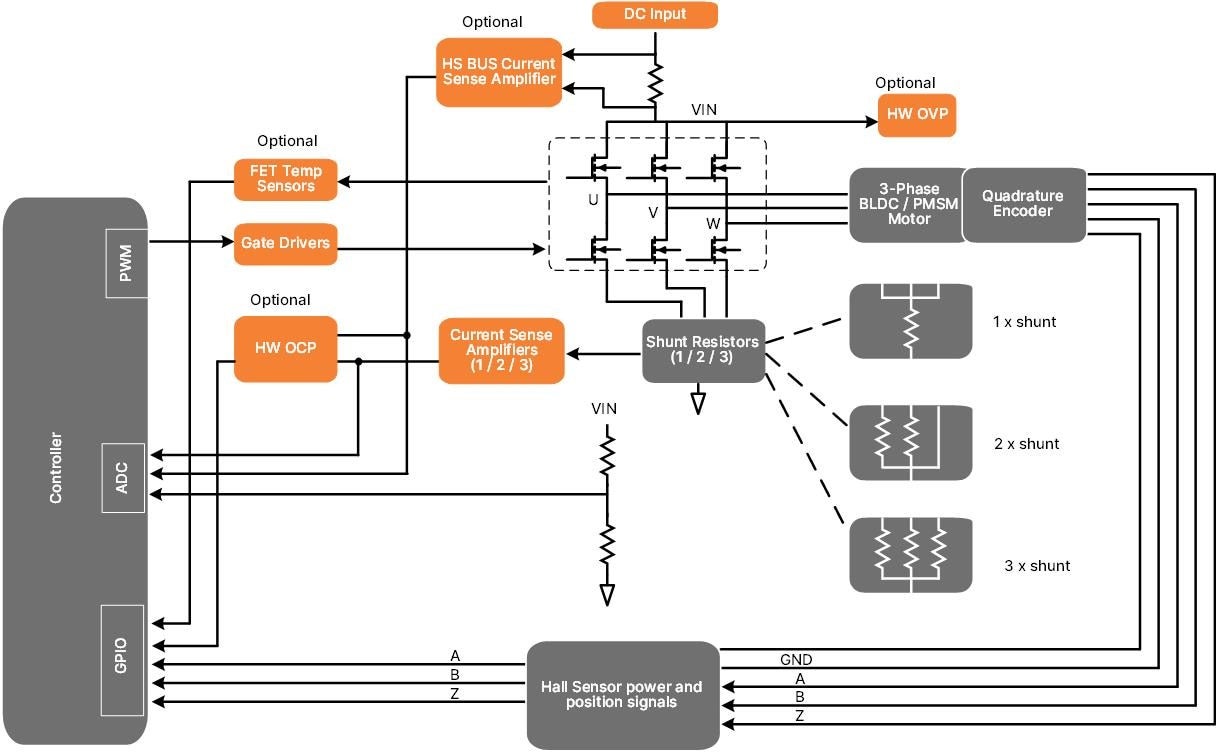
Figure 2: Sensored FOC Motor Control System Block Diagram
Figure 2 shows the required signals for a sensored FOC implementation using a quadrature encoder. At a minimum, 1-3 current sense inputs (depending on shunt configuration) to an ADC and three GPIO pins for the quadrature A/B/Z signals are required for feedback. Power must also be provided to the encoder.
Sensorless FOC
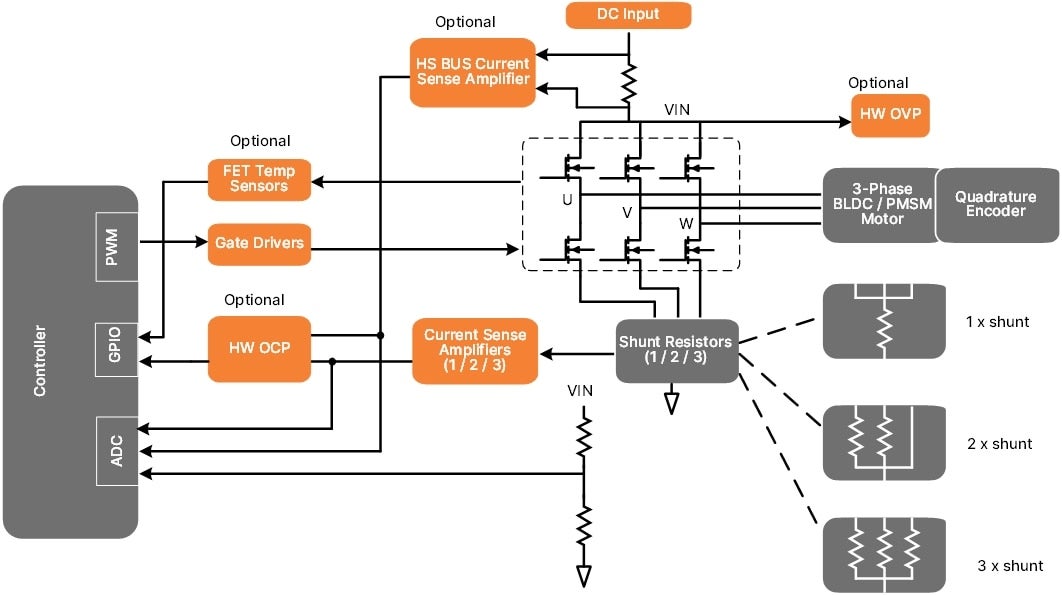
Figure 3: Sensorless FOC Motor Control System Block Diagram
Figure 3 shows the required signals for a sensorless FOC implementation. Depending on the shunt configuration, one to three current sense inputs at a minimum are needed for an ADC for feedback.
Motor Development Kits STR-1KW-MDK-GEVK and STR-MDK-4KW-65SPM31-GEVK are two comprehensive motor control solutions that use sensored and sensorless FOC control to drive a motor using high power modules.
Protection Features
Over-Current Protection (OCP)
For FOC, since LS current sensing is already being implemented for control, those same signals can also be used for OCP. However, as mentioned previously, low-side current sensing will only detect faults in the inverter stage and motor. An additional HS bus current sensing circuit can be implemented for protection from other faults downstream of the supply.
Hardware, software, or both can achieve OCP. Typically, hardware-based OCP will provide a faster response, but software-based OCP has more flexibility. The full-scale current measurement range of the ADC limits the maximum trigger point of a software-based OCP. A combined hardware/software implementation can be used to implement a latching OCP for quickly mitigating catastrophic hard faults, while a software-based OCP can control dynamic events such as cycle-by-cycle phase current limiting.
Over-Voltage Protection (OVP)
In specific applications, such as where regenerative braking may cause excessively high voltages on the DC bus, it may be necessary to implement HW OVP via diode-clamping or crowbar circuit. Software-based OVP can also be implemented by monitoring the DC bus and protecting the motor from potentially damaging voltages above the motor’s rated voltage by disabling the inverter output.
Over-Temperature Protection (OTP)
Monitoring the inverter MOSFET and/or board temperatures is generally a good idea for all control methods, especially when the system is subjected to varying ambient temperatures or in the event of cooling system failure. For example, PWM duty cycle limits can be dynamically reduced as temperature increases, and thermal monitoring can also help determine component degradation over time.
MOSFET Gate Drivers
Gate driver selection for the inverter MOSFETs is critical for any motor control system— and should be explicitly tailored to system requirements. Incorrect gate driver selection could result in significant performance degradation and even catastrophic system failure.
A variety of single-phase HS-LS MOSFET gate drivers, like the NCP51530 and the FAN73933, are available that can be used per inverter phase (total of 3). However, for 3-phase motor control, there is also the option of using specialized integrated 3-phase gate drivers, including the FAN7388, FAN73896, and FAN7888. Generally, three single-phase gate drivers provide better raw performance than an integrated 3-phase solution due to tighter coupling to each phase. However, integrated 3-phase drivers also commonly implement auxiliary features common in motor control applications, reducing hardware complexity, component count, and board size. Also, some gate drivers feature automatic complementary gate drive outputs and deadtime insertion, which allows a single PWM output (required PWM signals from controller cut from six to three) to control each inverter phase. Note that this feature is not appropriate for some PWM schemes.
Combined with basic protection techniques, FOC can be one of the most efficient methods of driving an electric motor and a great way of improving the control and accuracy of the motors in a variety of applications.
Learn more about how onsemi simplifies the development of efficient and reliable motor drive systems with our latest Motor Development Kits.